
|
HALO |
 |
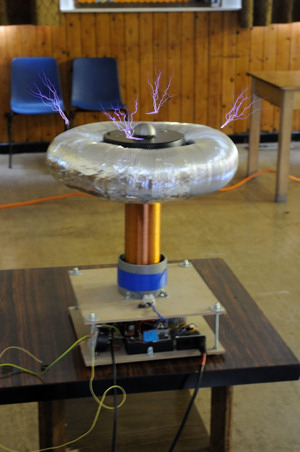
Halo's toplaod and breakout, The Breakout made from florests wire is rotated by a stepper motor at 10-15 Revs per second. |
 |
All of the power for the breakout and electronics is incorporated in to the topload. The stepper motor is driven by a small microprocessor to ensure its rotation speed stays constant. I found that 12v drive for the stepper motor wasnt enough and so there is a 12v-24v DC-DC converter to allow higher speeds. Rotational syncronisation to the controller is ahecived with an optical fibre down the center of the secondary. |
 |
Halo works by having a sinchronised rotating topload breakout point. To Test the software I added a white peice of paper to the breakout and illuminated the topload from 6 x 3W leds connected to the coil enable. |
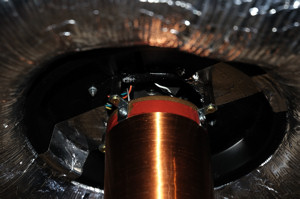 |
When running at power, the tin of the topload became hot, so the topload is now raised 20mm away from the secondary and a gap is left to allow air to enter the topload for cooling. |
 |
The electronics that drive the coil, The tube on the right is an RF guard for the bluetooth link. After many problems using bluetooth a solid data connection could not be maintained. This has now been replaced with a Fibre link. |
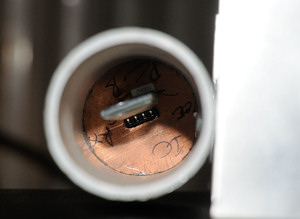 |
I first used a cheap fibre link to get the data to the tesla coil. This suffered from interferance so I dwitched to bluetooth. The Bluetooth pod, designed to stop the coil fom interfeering with the bluetooth signal. This never really worked. So I switched back to a much better and more expensive, fibre system. |
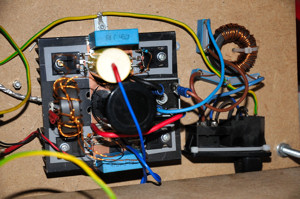 |
H bridge of IRF460's driven by a large GDT and capacitivly couped (non resonant) in to the primary) |
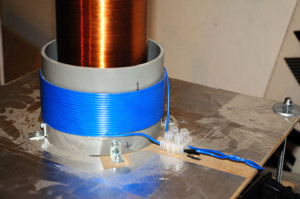 |
Primary 20 Turns of 0.5mm insulated stranded wire. |
 |
Halo Running |
